КОСМИЧЕСКИЕ СИСТЕМЫ
КОСМОРОБОТ
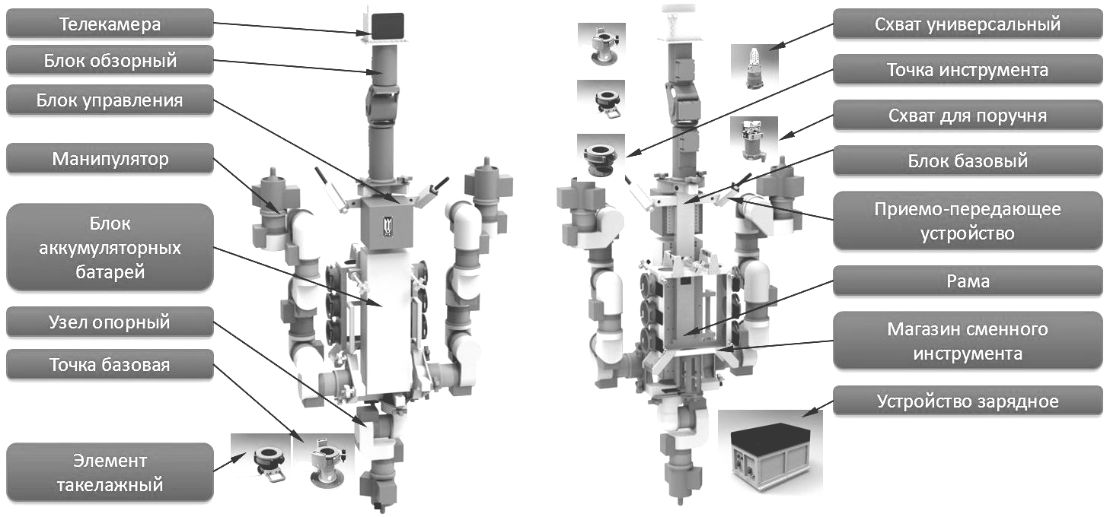
Робот мобильный для операций в открытом космосе
КОСМИЧЕСКИЕ СИСТЕМЫ
КОСМОРОБОТ
Робот мобильный для операций в открытом космосе
КОСМИЧЕСКИЕ СИСТЕМЫ
КОСМОРОБОТ
Робот мобильный для операций в открытом космосе

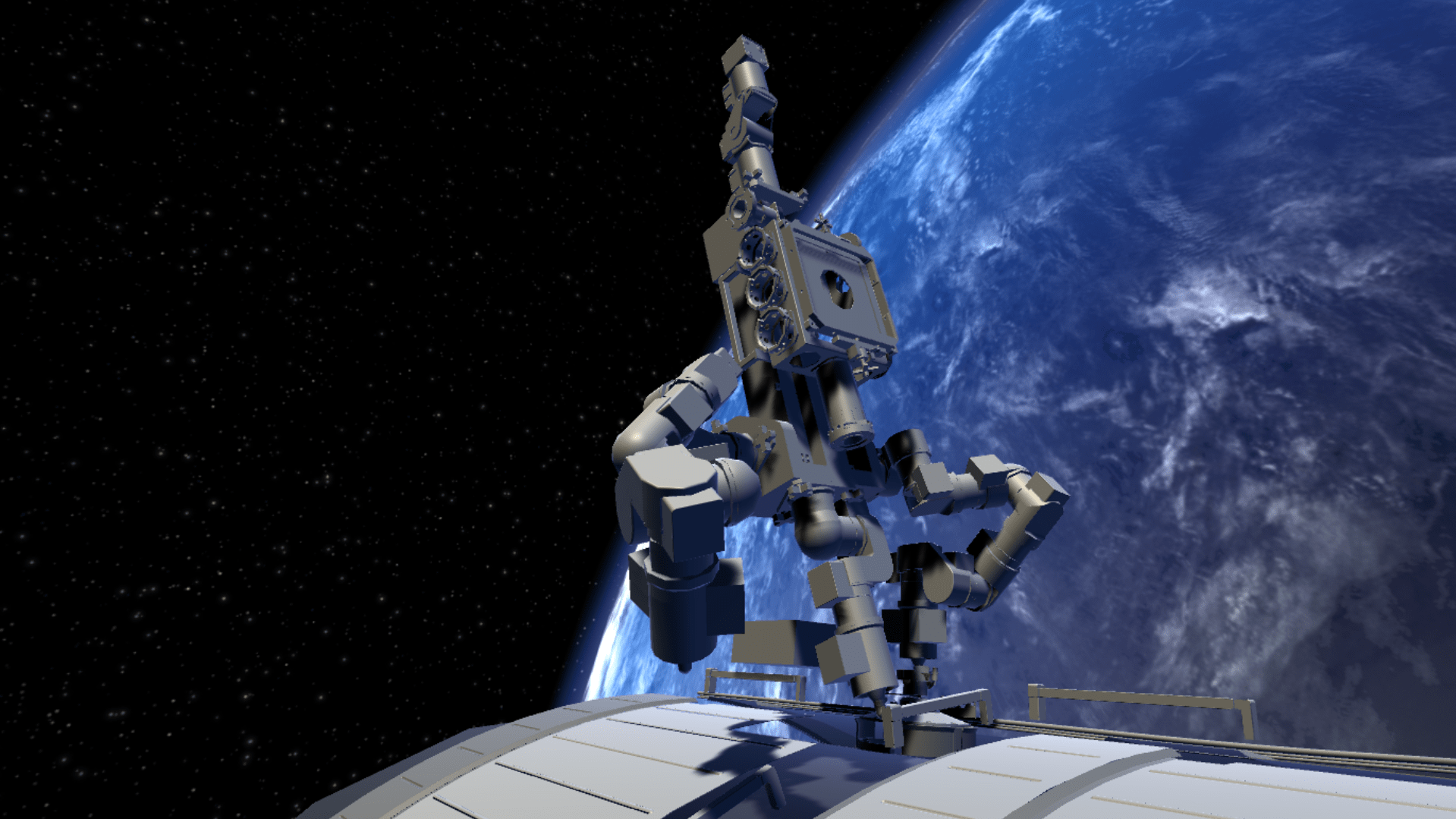
Входит в состав робота космического назначения, предназначенного для поддержки внекорабельной деятельности космонавтов и выполнения технологических операций на внешней поверхности космических аппаратов. В 2018 году закончен этап разработки рабочей конструкторской документации на создание «Косморобота», идет изготовление опытных образцов. После их тестирования и доработок появится первый летный образец робота, который будет испытан на борту научно-энергетического модуля (НЭМ) в составе российского сегмента МКС (РС МКС) до 2024 г.
«Косморобот» предназначен для работы в открытом космосе. При создании космического робота будут использоваться комплектующие, обладающие повышенной надежностью и способные обеспечить необходимый уровень безопасности. Космический робот будет строится по модульному принципу, что позволит заменять отказавшие элементы, агрегаты и узлы в условиях открытого космического пространства. Манипуляторы «Косморобота» будут оборудованы универсальными захватными устройствами с электрическими разъемами, что позволит осуществлять подзарядку космического робота от бортовой сети МКС.
- перемещение по такелажным элементам, базовым точкам и поручням РС МКС;
- перемещение полезного груза массой до 200 кг;
- закручивание и откручивание резьбовых соединений;
- разрезание экранно-вакуумной теплоизоляции модулей станции;
- отбор проб-мазков;
- стыковка и расстыковка электросоединителей.
- Средняя скорость – 12 шагов/ч
- Длина шага – 2.5 м
- Масса полезного груза – 200 кг
- Время непрерывной работы – 6 ч
- Время заряда батарей – 20 ч
- Количество степеней свободы – 16
- Радиус рабочей зоны манипулятора – 1 м
- Усилие манипулятора – 50 Н
- Масса робота – 250 кг
- Габаритные размеры – 2.5х1.2х0.7 м


Специальная оценка условий труда/ Программное обеспечение/ Документы/ Противодействие коррупции / Дипломы и награды
Для повышения удобства сайта и экономии времени посетителей мы используем cookies. Оставаясь на сайте, Вы соглашаетесь на обработку файлов cookie. Подробности в положении об обработке персональных данных пользователя сайта.
194064, Россия, Санкт-Петербург, Тихорецкий пр., 21
+7 (812) 552-01-10
rtc@rtc.ru
© 1998-2025 ЦНИИ РТК. Все права защищены